
In the intricate world of systems engineering, professionals often find themselves navigating a...

Imagine a future where satellites are rapidly designed, tested, and launched at a fraction of the cost and time that it currently takes while also supporting the growing In-Space Servicing, Assembly, and Manufacturing (ISAM) ecosystem. The US Space Force (USSF) and ISAM community are working to realize that vision under the Orbital Prime initiative.
Tangram Flex, Inc (Tangram) was honored to be selected to support USSF’s Orbital Prime Phase I vision. During Phase I Tangram partnered with University of Southern California Information Sciences Institute (USC ISI) to investigate and address challenges with systems integration and safety for companies working in the ISAM market. Specific concerns include addressing the software modification of systems already in space, enabling greater use (and reuse) of existing technologies, and addressing potential security vulnerabilities in systems that leverage Free and Open-Source Software (FOSS).
Sometimes it makes more sense to update systems that are already in space. Tangram and USC ISI’s partnership on the Orbital Prime project supported the strategic mission of “looking at ways to possibly reuse satellites for different things.” The partnership represents a significant milestone in advancing software development for space missions.
Tangram’s Principal Investigator, Eric Zwirner highlighted the partnership with USC ISI, "Working with USC ISI gave us the opportunity to explore and develop technologies related to software development efforts that are beneficial to the mission of Orbital Prime. These included component-based software engineering, technologies for legacy code reuse, interoperability technologies, and run-time assurance capabilities for keeping the system safe and secure at run-time. Tangram's efforts along with those of USC ISI were all targeted to faster, less expensive software development and integration in support of the Orbital Prime mission."
Another challenge area that the team tackled was addressing the security of systems in development. When mitigating space debris, a robotic arm that relies on FOSS would be a common tool for capturing or otherwise working with target debris. The creation of the required code from scratch is a complex process so code reuse is often the chosen path. Using FOSS code can reduce development time but introduces a level of risk into critical systems that must be properly addressed. Tangram and USC ISI developed tests and mitigation strategies through run-time assurance (RTA) to address these concerns using the robotic arm below as a demonstrator. The resulting work was tested using a set of test scenarios that showcased the ability to cyber harden the robot arm such that it could not make unsafe movements even if miscommanded or hacked.
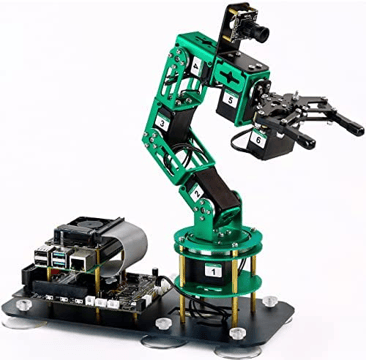
Figure 4. Image of Robotic Arm with Control Boards
If selected for the second Phase of Orbital Prime, Tangram will be working with the University of Southern California Information Sciences Institute (USC ISI) and Kall Morris Inc (KMI) to make space system software more safe, modular, and easily integrated. This is achieved using the benefits of Component-Based Software Engineering (CBSE) approaches and tooling in addition to run-time assurance to further ensure system safety and security for space-focused operations. Tangram and USC ISI will bring technologies developed and advanced in Phase I of the program into a real space vehicle being developed by KMI specifically for the Orbital Prime mission. KMI’s debris remediation system is an ideal platform for proving how these technologies can assist ISAM companies in achieving their goals. The end result will be a space system that is safer, more secure, and more modular. The team's work will ensure that other ISAM companies can more rapidly and securely design, develop, and deploy ISAM solutions for the USSF.
Looking for a world-class software integration partner? Visit tangramflex.com to learn more about how our talented team of software engineers can help you solve the highest of software integration challenges or how leveraging Tangram’s collaborative integration platform, Tangram Pro™, can empower you to design, build and run your software in a repeatable, secure, and validated process for ultimate confidence in your software integration needs.